САПР кинематических моделей МР
Разместите заказ на фриланс-бирже и предложения поступят уже через несколько минут.
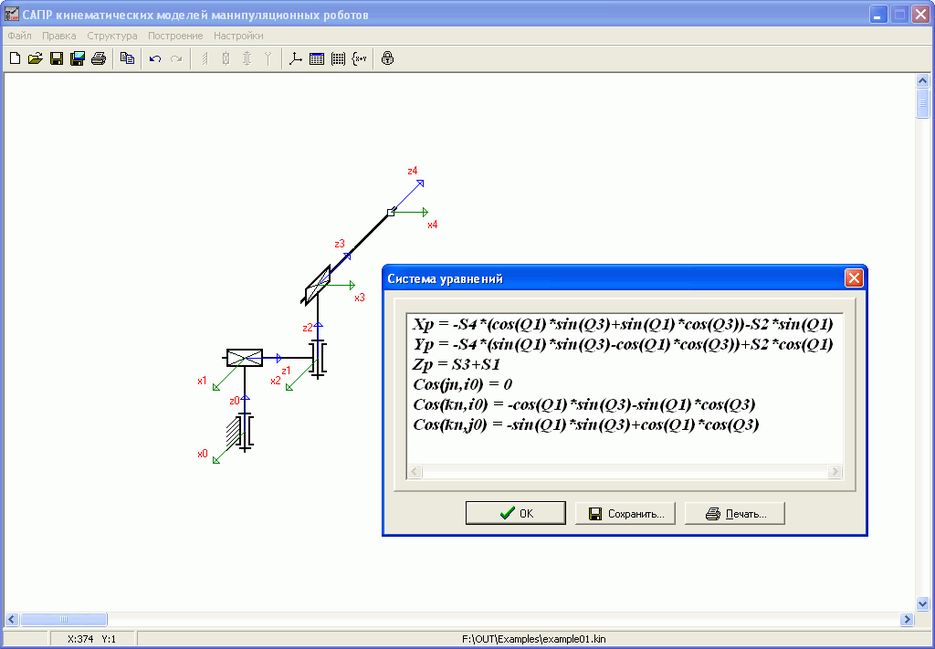
САПР КИНЕМАТИЧЕСКИХ МОДЕЛЕЙ МАНИПУЛЯЦИОННЫХ РОБОТОВ
Система автоматизированного проектирования кинематических моделей манипуляционных роботов разработана для автоматизации моделирования кинематики манипуляционных роботов. Система позволяет:
- создать на экране графическое изображение структурной схемы робота произвольной структуры;
- произвести автоматически анализ схемы и наложить системы координат по способу Денавита-Хартенберга;
- отобразить системы координат на графическом изображении структурной схемы манипуляционного робота;
- получить таблицу параметров манипуляционного робота;
- построить систему нелинейных уравнений, являющуюся кинематической моделью манипуляционного робота;
- сохранять данные о построенной структуре в файле и загружать сохраненные структурные схемы;
- сохранять и распечатывать изображение структурной схемы, таблицу параметров, матрицы преобразования координат и систему уравнений.
Программа написана во время учёбы в университете. Одна из первых моих работ. Используется при изучении робототехники. Очень помогла при сдаче гос. экзамена.