САПР Робот
Найдите исполнителя для вашего проекта прямо сейчас!
Разместите заказ на фриланс-бирже и предложения поступят уже через несколько минут.
Разместите заказ на фриланс-бирже и предложения поступят уже через несколько минут.
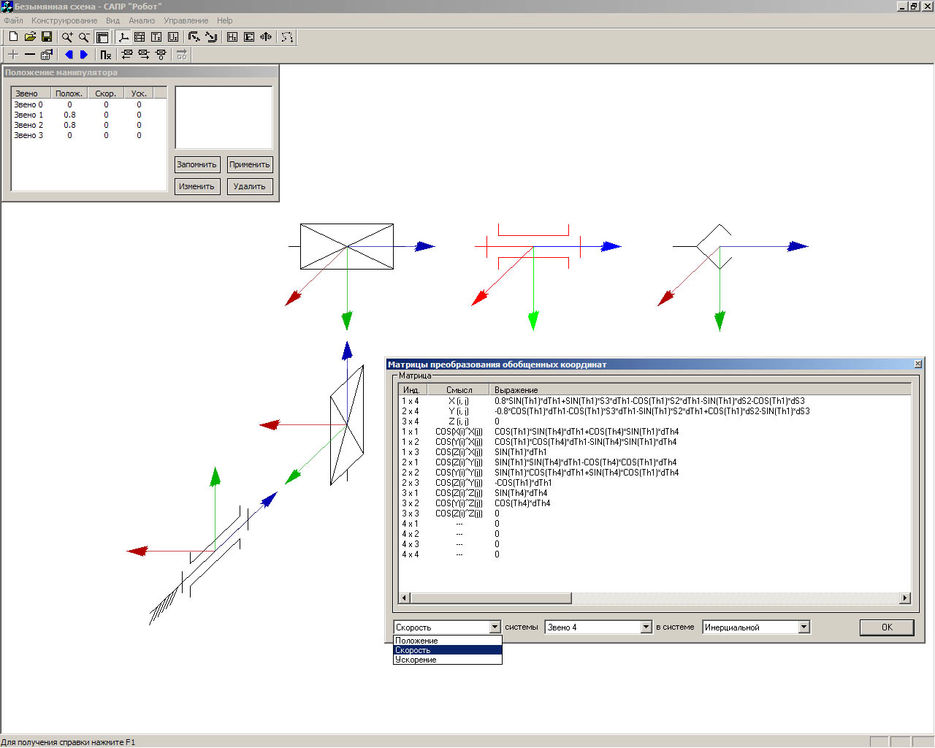
Это снимок экрана из Системы Автоматизированного Проектирования манипуляционных роботов. Программа дает возможность спроектировать "руку" робота, после чего можно проводить разнообразный анализ его характеристик. Можно получить кинематические и динамические свойства манипулятора, решить прямые и обратные задачи для определения перемещения звеньев, необходимых для занятия манипулятором определенного места в пространстве. Можно "повертеть" робота, наглядно представляя его устройство.
Для построения формул используется собственная система символьных расчетов.