САПР Робот
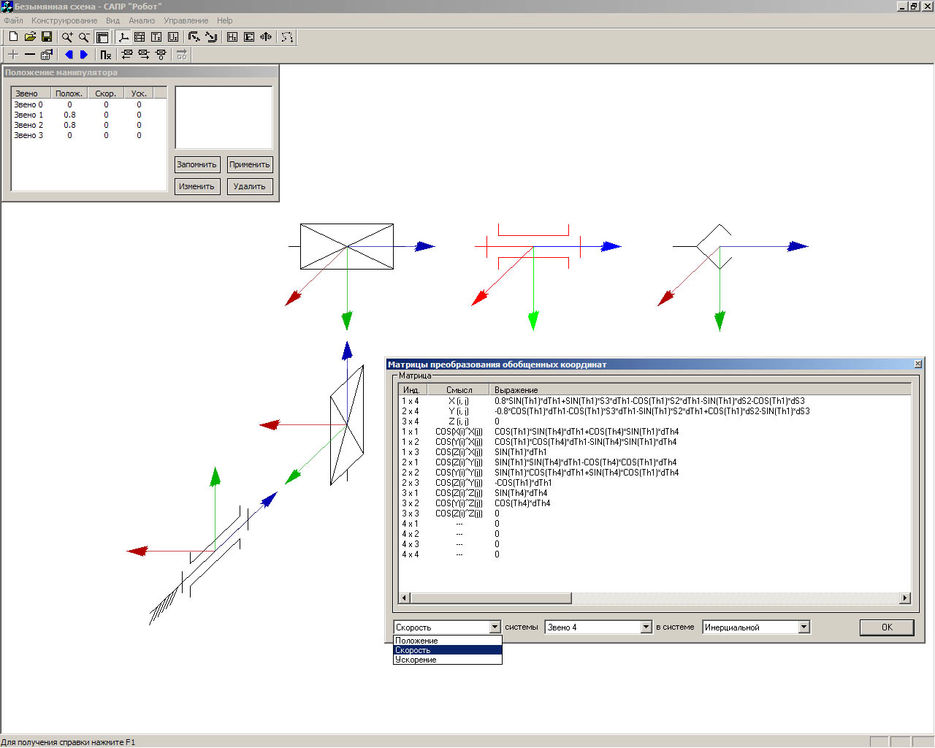
Это снимок экрана из Системы Автоматизированного Проектирования манипуляционных роботов. Программа дает возможность спроектировать "руку" робота, после чего можно проводить разнообразный анализ его характеристик. Можно получить кинематические и динамические свойства манипулятора, решить прямые и обратные задачи для определения перемещения звеньев, необходимых для занятия манипулятором определенного места в пространстве. Можно "повертеть" робота, наглядно представляя его устройство.
Для построения формул используется собственная система символьных расчетов.